





The TARES Unmanned Combat Air Vehicle (UCAV) is an intelligent weapon system developed by Rheinmetall Defence Electronics GmbH (formerly STN ATLAS Elektronik) in Bremen, which is a 100% subsidiary of Rheinmetall DeTec AG.
Recommended White Papers
Recommended Buyers Guides
TARES (Tactical Advanced Recce Strike) is based on the Taifun UCAV, but has been modified for a standoff engagement rather than a battlefield role. The maiden flight of the Taifun system was successfully completed in December 2002. In 2003, development on the Taifun was halted while the design specifications were modified. The TARES first flew in December 2004. A successful series of trials were concluded in September 2005. No further development has been reported.
TARES has a range of 200km and can remain airborne for up to four hours. The vehicle can autonomously carry out target search, classification, identification and engagement. Man-in-the-loop capability allows the mission commander to authorise target engagement. The system can be deployed against armoured and unarmoured, stationary and mobile ground targets such as tanks and artillery systems, and mobile or fixed radars and command posts.
In December 2004, Rheinmetall DeTec announced an alliance with Teledyne Brown Engineering of the USA to market the Thunder UCAV, based on the TARES, in the USA. The system was offered for the US Army Future Combat Systems (FCS) Class III UAV requirement but was not selected.
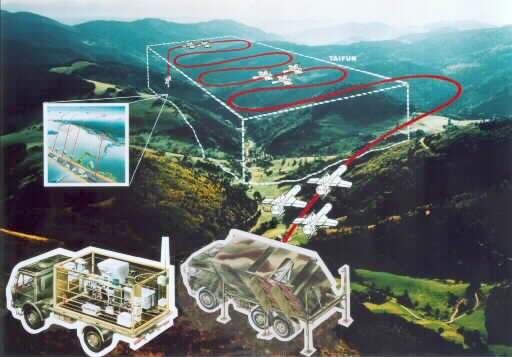
TARES unmanned combat air vehicle system
A TARES system consists of 16 air vehicles installed in Launch, Transport and Storage Containers (LTSC), with associated ground service equipment and a modular Gground Control Station (GCS). Each launch container contains four air vehicles.
The standard sized containers are transportable by truck or by air, e.g. CH-53 helicopter, Transall C160 or future transport aircraft.
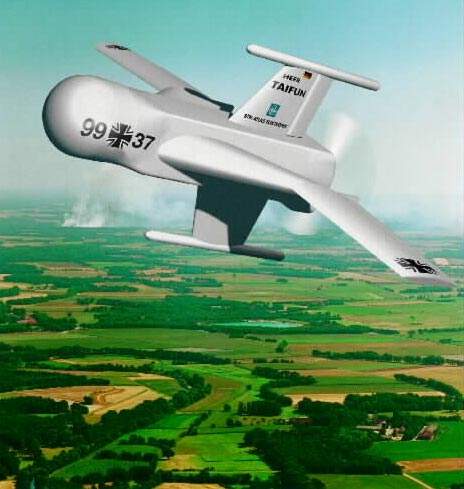
TARES unmanned air vehicle
The air vehicle is of relatively small size, with a wingspan of 2.6m, a length of 2.3m and a height of 1.1m, and is made of multi-spectral stealth material. The navigation system includes an integrated Global Positioning and Inertial Navigation System (GPS/INS) and terrain contour matching. The flight control computer uses the navigation and target data and the command link data for the progressive phases of the mission.
The vehicle’s cross wing configuration combines the aerodynamic characteristics of a conventional aircraft with those of a guided missile system and provides precise manoeuvrability even in a high-speed dive.
The air vehicle is fitted with a high-resolution infrared seeker and an all-weather Synthetic Aperture Radar (SAR). A de-icing system allows operation in freezing environments. The high-resolution millimetre wave radar seeker operates at approximately 35GHz in K-band and has a resolution of better than 0.7m. The seeker has Doppler Beam Sharpening (DBS) and Moving Target Indicator (MTI) capability for the identification and tracking of moving and stationary targets.
The radar can operate in both spot targeting and swivel modes. The system is robust against hostile jamming and the seeker can operate in home-on-jam mode against radar emitting targets.
The on-board communications suite includes a 225MHz to 400MHz UHF data link. The signal processing unit uses embedded image data compression algorithms which, when used in conjunction with high-performance, high data rate channels, enable very fast transmission of radar and infrared images from the air vehicle to the ground control station.
The vehicle is armed with a proximity-fused 20kg high-explosive shaped charge warhead.
TARES UCAV engine
The air vehicle is powered by a single, kerosene fuelled, four-stroke piston engine which develops 34kW. The engine is fitted with a four-bladed wood pusher propeller.
The medium speed of the air vehicle is 180km/h. The very low fuel consumption allows a flight time of several hours.
TARES UCAV deployment
A typical mission might begin with the unit receiving a command through the ADLER, the German army artillery command, control and communication computer network data link. The unit formulates a mission plan, which is converted to a sequence of mission programs for the deployed UCAVs. The programs are downloaded via fibre-optic data link to the LTS containers and then to the individual TARES air vehicles.
An automatic launch sequence control gives a high sequential launch rate, with four vehicles capable of being launched in 5min. The air vehicle’s engines are started and it is launched from the container by a booster rocket. After the rocket is burned out and the air vehicle has accelerated to maximum speed, the rocket is jettisoned automatically.
The air vehicles climb to the maximum cruise altitude and are autonomously navigated towards the target areas using the predefined planned flight paths. The target area can be up to 2,000km².
Automated UCAV target selection
When the air vehicle has flown to the designated target area, the seeker switches into search mode. While the air vehicle is in flight, the detected potential targets are continuously classified against predefined algorithms, then prioritised and selected and the air vehicle is set in hard kill mode against its allocated target.
In complex, highly dynamic scenarios, where the numbers of targets and the timing and scope of the engagement are unknown, the UCAVs operate interactively with quickly changing priorities in order to optimise the engagement and also to minimise collateral damage.
Information concerning the air vehicle’s status and target acquisition is transferred from the vehicle via the UHF data link to the Ground Control Station. The SAR radar images can be transferred in real-time to the GCS using the UHF data link and, if required, the operator in the GCS can choose to carry out target identification and selection using the IR image displays.
The vehicle can perform a full circle loiter manoeuvre at a speed of 200km/h in order to gather images of the target from all angles. The vehicle manoeuvres into a steep spiral dive towards the target and the target’s location is continuously monitored and verified by operator in the GCS. The radar uses monopulse tracking mode during the spiral descent.
In the final target approach phase of flight, the vehicle’s speed is about 500km/h, and the target images can be generated at very short intervals, which allows the mission to be reliably aborted just seconds before the calculated hit time. The capability allows TARES to carry out reconnaissance, error-free target identification and visual surveillance until shortly before completion of the target engagement.
The 20kg shaped high-explosive warhead is initiated at an optimised distance to the target to allow precise penetration of heavily armoured targets. The warhead also initiates a radial blast of shrapnel.